
由此产生的扭矩三相感应电动机取决于以下三个因素:
首先,转子电流的大小,其次是助势这与三相感应电动机的转子相互作用,并负责在转子部分中产生EMF感应电动机,最后是功率因数三相感应电动机的转子。
结合所有这些因素,我们得到了扭矩的等式 -
其中,T是由感应电动机产生的扭矩,
φ是负责产生诱导的EMF的助焊剂,
一世2转子电流,
Cosθ.2是转子电路的功率因数。
由定子产生的磁通Φ与定子EMF E成比例1。
即φαe1
我们知道转化比k被定义为次要的比例电压(转子电压)到初级电压(定子电压)的电压。
转子当前一世2被定义为在运行条件下的转子诱导的EMF的比率2到总阻抗,z2转子侧,
和总阻抗z2在转子侧给出,
将此值放在上面的等式中,我们得到,
s =滑动感应电动机
我们知道功率因数被定义为比例抵抗性对阻抗的影响。转子电路的功率因数是
把价值置于助势φ,转子电流i2,功率因数cosθ2在扭矩的等式中,我们得到了,
结合类似的术语我们得到,
去除比例常数我们得到,
在哪里,nS.是r中的同步速度。p。S,NS.= N.S./ 60.因此,最后扭矩的方程变成了
扭矩方程中k的推导。
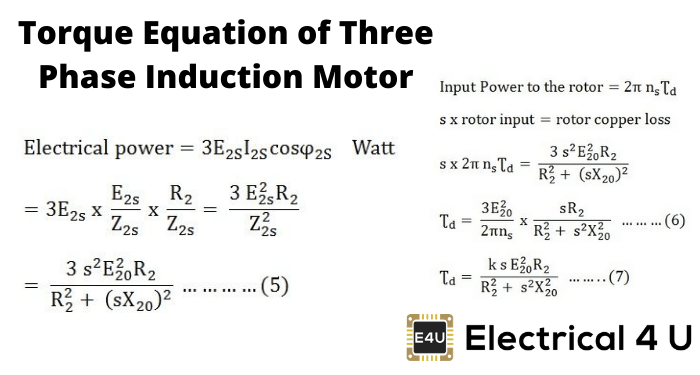
的情况下三相感应电动机,转子发生铜损失。这些转子铜损失表示为
P.C= 3i.22R.2
我们知道转子电流,
替换我的这个值2在转子铜损失的等式中,pC。所以,我们得到了
p的比例2:P.C:P.m= 1:S:(1 - S)
在哪里,p2转子输入,
P.C转子铜损失,
P.m是机械力量的开发。
替换我们获得的上面的等式的PC值,
简化我们得到,
机械动力发育了pm=TΩ,
取代p的值m
我们知道转子速度n = nS.(1 - s)
将这种转子速度的值替换在上面的等式中,我们得到,
NS.是每分钟革命的速度(rpm)和nS.每秒革命的速度是速度(rps),两者之间的关系是
替换n的这个值S.在上面的等式和简化它的情况下
比较方程式,我们得到,常量k = 3 /2πnS.
三相感应电动机的工作原理 - 视频
三相感应电动机启动扭矩方程
启动扭矩是由此产生的扭矩感应电动机它开始时。我们知道在开始转子速度时,n为零。
因此,通过简单地将S = 1的值在三相感应电动机的方程中简单地将S = 1的值施加来实现起始扭矩的等式,
起始扭矩也称为静止扭矩。
三相感应电动机的最大扭矩条件
在扭矩方程中,
转子电阻,转子电感电抗和感应电动机的同步速度保持恒定。电源电压到三相感应电动机通常是额定且保持恒定,因此定子EMF也保持不变。我们将变换比率定义为转子EMF与定子EMF的比率。因此,如果定子EMF保持恒定,则转子EMF也保持恒定。
如果我们想找到一些数量的最大值,那么我们必须区分有关某些变量参数的数量,然后将其放置到零。在这种情况下,我们必须找到最大扭矩的条件,因此我们必须区分关于一些可变量的扭矩,这是在这种情况下,因为扭矩等式中的所有其他参数保持恒定。
所以,对于扭矩是最大的
现在通过使用划分的分化规则来区分上述方程。在将术语等于零的差异和差异化上,我们得到,
忽视我们获得的滑块的负值
所以,当滑动时= r2/ X2,扭矩将是最大的,并且该滑动称为最大滑动Sm,它被定义为转子电抗的转子电阻的比率。
注意:在起动S = 1时,使转子电阻等于转子电抗时出现最大起动转矩。
最大扭矩方程
扭矩方程是
扭矩将是最大的,当滑动时= r2/ X2
将该滑移的值替换在上方等式中,我们得到了扭矩的最大值,
为了增加起始扭矩,额外的抵抗性应在转子电路中加入到转子电路上,随着电动机升温而逐渐切出。
结论
从上面的等式中得出结论
- 最大扭矩与静止处的转子诱导EMF的正方形成比例。
- 最大扭矩与转子电抗成反比。
- 最大扭矩与转子电阻无关。
- 最大扭矩发生的滑动取决于转子电阻,R2。因此,通过改变转子电阻,可以在任何所需的滑动中获得最大扭矩。




