
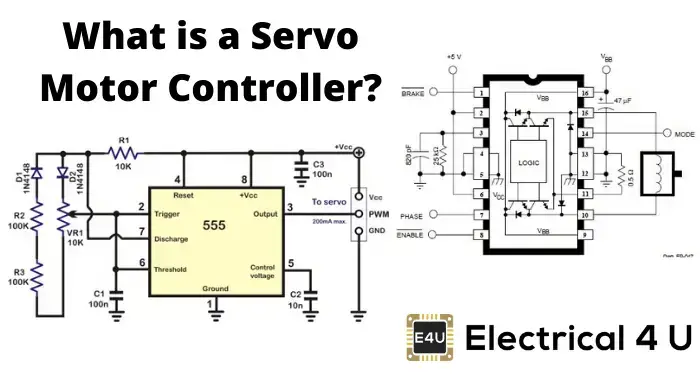
伺服电机控制
为理解伺服电机控制让我们考虑一个伺服电机的例子,我们给了一个信号旋转45度o然后停下来,等待进一步指示。轴直流电机另一轴称为输出轴,在齿轮的帮助下装配而成。该齿轮总成用于降低电机的轴的高转速到伺服系统的输出轴的低转速。
的电压调节旋钮电位计是这样安排与输出轴通过另一个齿轮总成,在旋转的轴,旋钮也旋转,并创造一个变化电势根据电位器。
这个信号即电势随着电位器旋钮从0开始沿系统轴的角度运动而增加o到45o。这个电势或电压与输入参考值(即输入信号电压)一起被带到误差检测器反馈放大器。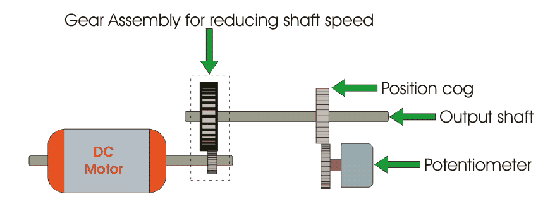
随着轴的旋转角度从0增加o到45o电位器的电压增加。在45岁o该电压达到等于系统给定输入命令电压的值。在轴的这个位置,没有区别的信号电压来自电位器和参考输入电压(命令信号)到系统,放大器的输出电压变为零。
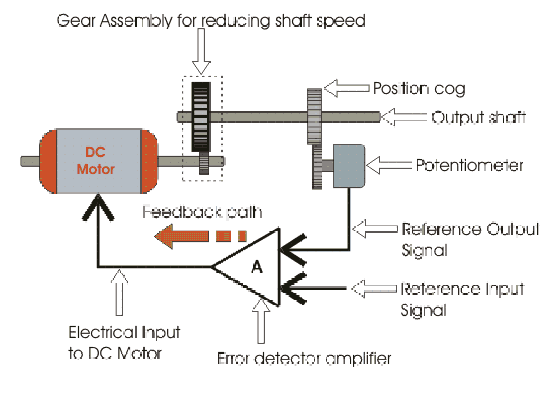
根据放大器的输出电压信号上方的图像,充当输入电压直流电机。因此,当轴旋转45度后,电机停止转动o。电机将处于这个静止位置,直到向系统发出另一个命令,使轴向期望的方向进一步运动。从这个例子中我们可以了解到最基本的伺服电机理论以及如何伺服电机控制是实现。
注:虽然在实际伺服电机控制系统中,不是使用简单的/电位器-工作原理-电位器/我们使用数字或模拟位置传感器编码器。
从这个基本伺服电机工作原理可以得出结论。伺服的轴连接到电位器。连接电位器的伺服内部的电路,知道伺服的位置。的当前的位置将在错误检测放大器的帮助下连续地与期望的位置进行比较。如果不匹配被发现,那么在错误放大器的输出端提供一个错误信号,轴将旋转到所需的准确位置。一旦到达所需的位置,它就会停止并等待。
连续旋转伺服电机
连续旋转伺服电机实际上是一个修改版本的什么伺服实际上是要做的,那就是,控制轴的位置。360年o旋转伺服系统实际上是通过改变伺服系统内部的某些机械连接来实现的。然而,像视差这样的制造商也在销售这些伺服系统。随着连续旋转伺服,你只能控制方向和伺服的速度,但不是位置。


")

