
在我向您介绍概念之前控制系统的状态空间分析在此,讨论与传统理论的差异是非常重要的控制系统以及现代控制系统理论。
- 传统的控制理论完全基于频域方法,而现代控制系统理论完全基于时域方法。
- 在传统的控制系统理论中,我们具有线性和时间不变的单输入单输出(的输出)仅限系统,但在现代控制系统的理论的帮助下,我们还可以轻松地进行均匀的非线性和时变多输入多输出(MIMO)系统的分析。
- 在现代控制系统理论中,稳定性分析和时间响应分析都可以用图解法和解析法来进行。
现在控制系统的状态空间分析基于现代理论,适用于单个输入单输出系统,多个输入和多个输出系统,线性和非线性系统,时间变化和时间不变系统等系统。让我们考虑一些与现代控制系统理论的国家空间分析相关的基本术语。
- 状态空间中的状态分析:是t = t时知识最小的变量集合0与T≥T的知识一起0给出了系统在任意时刻t≥t时的行为的完整信息0。
- 状态空间分析中的状态变量:它是指最小的变量集,帮助我们确定动态系统的状态。状态变量由x定义1(t),x2X (t)……n(t)。
- 状态向量:假设需要n个状态变量来描述给定系统的完整行为,那么这n个状态变量被认为是向量x(t)的n个分量。这样的向量称为状态向量。
- 状态空间:它是指具有x的n尺寸空间1轴,X.2轴......... x.n轴。
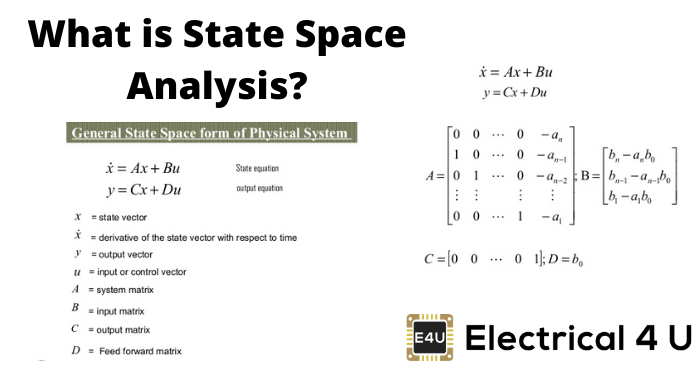
状态空间方程
让我们推导出线性时不变系统的状态空间方程。
让我们考虑有r个输入和m个输出的多输入和多输出系统。
式中,r = u1,你2,你3.......... .. U.r。
和m = y1y2......... .. Y.米。
现在我们用n个状态变量来描述给定的系统,因此n = x1, x2, ...........xn。
我们也把输入和输出向量定义为,
输入向量的转置,
其中,t转换矩阵。
转换输出矢量,
其中,t转换矩阵。
状态向量的转置,
其中,t转换矩阵。
这些变量由一组方程联系在一起,这些方程写在下面,被称为状态空间方程
使用传递函数表示状态模型
分解:它被定义为从给定的传递函数得到状态模型的过程。现在我们可以用三种不同的方法分解传递函数:
- 直接分解,
- 级联或系列分解,
- 并行分解。
在上述的分解方法中,我们首先将给定的传递函数转化为微分方程,也称为动力学方程。转化成微分方程后,我们求逆拉普拉斯变换然后,上述等式,然后对应于我们可以创建模型的分解类型。我们可以代表状态模型中的任何类型的传递函数。我们有各种类型的模型,如电模型,机械模型等。
转移矩阵在A,B,C和D方面的表达。我们将传输矩阵定义为输出的Laplace变换到LAPPALL的输入。
在重新写出状态方程并同时对状态方程做拉普拉斯变换(假设初始条件为零)我们得到
我们可以把方程写成
式中,I是单位矩阵。
现在将X(s)的值代入方程Y(s),让D = 0(意味着是一个空矩阵)
矩阵的逆可以用adj来代替矩阵除以矩阵的行列式,现在重新写一下这个表达式
| SI-A |当等同于零时也称为特征方程。
特征值和特征向量的概念
我们上面描述的特征方程的根称为矩阵A的特征值或特征值。
现在有一些与特征值有关的性质这些性质写在下面-
- 任何方形矩阵A及其在具有相同的特征值。
- 任何矩阵A的特征值的总和等于矩阵A的轨迹。
- 任意矩阵A的特征值的乘积等于矩阵A的行列式。
- 如果我们将一个标量乘以矩阵a那么特征值也将乘以相同的标量值。
- 如果我们对给定的矩阵A求逆,那么它的特征值也得到逆。
- 如果矩阵的所有元素都是实数那么对应于该矩阵的特征值要么是实数要么存在于复共轭对中。
现在存在对应于一个特征值的一个特征向量,如果它满足以下条件(ek×i-a)pk = 0。其中,k = 1,2,3,...... ..
状态转换矩阵和零状态响应
我们感兴趣的是推导出状态转移矩阵和零状态响应的表达式。再一次用我们上面推导的状态方程拉普拉斯变换我们有,
现在在重写上述等式上
让(一)-1=θ(s)并采用我们的上述等式的逆拉普拉斯
表达式θ(t)称为状态转换矩阵。
l-1.θ(t)bu(s)=零状态响应。
现在让我们讨论状态转移矩阵的一些性质。
- 如果我们在上面的等式中替换T = 0,那么我们将获得1.数学,我们可以写入θ(0)= 1。
- 如果我们把t = -t代入θ(t)就会得到θ(t)的倒数。数学上我们可以写θ(-t) =[θ(t)]-1。
- 我们还有另一个重要的属性[θ(t)]n=θ(nt)。

")


