
一个转换功能表示a的输出信号之间的关系控制系统和输入信号,用于所有可能的输入值。框图是控制系统的可视化,其使用块来表示传送功能,以及表示各种输入和输出信号的箭头。
对于任何控制系统,存在称为激励或原因的参考输入,其通过传送操作(即传递函数)来产生导致受控输出或响应产生的效果。
因此,输出和输入之间的原因和效果关系彼此相关转换功能。![]()
在一个拉普拉斯变换,如果输入由R(s)表示,输出由c(s)表示,则传输函数将是:![]()
也就是说,系统的传递函数乘以输入函数给出了系统的输出功能。
什么是转移函数
控制系统的传递函数被定义为输出变量的拉普拉斯变换与假设所有初始条件为零的输入变量的拉普拉斯变换的比率。![]()
用于确定控制系统的传递函数的过程如下:
- 我们形成系统的等式。
- 现在我们参加系统方程的拉普拉斯变换,假设初始条件为零。
- 指定系统输出和输入。
- 最后,我们采用输出的拉普拉斯变换和输入的拉普拉斯变换的比率,这是所需的传递函数。
控制系统的输出和输入不必是相同的类别。例如,在电动机输入是电信号,而输出是机械信号,因为旋转电机所需的电能。类似地,在发电机中,输入是机械信号,输出是电信号,因为需要机械能在发电机中产生电力。
但是对于数学分析,系统的所有信号都应以类似的形式表示。这是通过将各种信号转换为Laplace形式来完成的。此外,系统的传递函数由LAPALCE表单分开输出拉普拉斯传递函数来输入LAPALP传递函数来表示。因此,控制系统的基本框图可以表示为![]()
![]()
其中R(t)和c(t)分别是输入和输出信号的时域功能。
获得传递函数的方法
有两种方法可以获得控制系统的传递函数。方式是:
- 框图方法:导出复杂控制系统的完整传递函数是不方便的。因此,控制系统的每个元素的传递函数由框图表示。框图施加减少技术以获得所需的传递函数。
- 信号流程图:框图的修改形式是一个信号流程图。框图给出了控制系统的图形表示。信号流程图还缩短了控制系统的表示。
转移函数的极点和零
通常,函数可以表示为其多项式形式。例如,![]()
现在类似地,控制系统的传递函数也可以表示为![]()
其中k被称为传递函数的增益因子。
如果s = z,则在上面的功能中1,或s = z2,或s = z3.,...... .s = zN,传递函数的值变为零。这些Z.1,z.2,z.3.,...... .z.N,是分子多项式的根。至于这些根部分子多项式,传递函数变为零,这些根部称为转移函数的零。
现在,如果s = p1,或s = p2,或s = p3.,... .s = pm,传递函数的值变为无限。因此,分母的根部称为该功能的极点。
现在让我们以其多项式形式重写传输函数。![]()
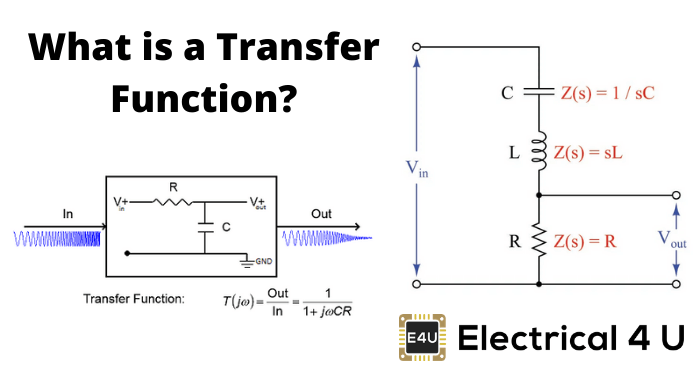
现在,让我们考虑对无穷大的方法,因为根部是所有有限数量,与无限的S相比,它们可以忽略它们。所以 传递函数通常在拉普拉斯变换中表示,只不过是系统的输入和输出之间的关系。让我们考虑一个系统由连接的系列组成反抗(r)和电感(l)在A中电压源(v)。 从电路,我们得到, 现在应用拉普拉斯变换,我们得到, 这里n = 2和m = 5,如n 3) 单位脉冲信号被定义为 1)系统的脉冲响应是 因此,系统的传递函数是 3)杆和零绘制在平原上,如下所示 因此,该功能的分子将是, 5)找到以下网络的传递函数。![]()
因此,当S→∞和n> m时,该功能将具有无穷大的值,这意味着传递函数在无限s处具有磁极,并且这种杆的多重或顺序是n - m。
同样,当S→∞和n 转移功能的概念
在该电路中,当前'i'是由于应用的响应电压(v)作为原因。因此电压和当前的电路可以分别被认为是系统的输入和输出。![]()
![]()
系统的传递函数,g(s)= i(s)/ v(s),输出与输入的比率。
1)让我们通过一个例子解释杆的概念和转移函数的零。![]()
解决方案
该功能的零是-1,-2,函数的极点是-3,-4,-5,-2 + 4j,-2 - 4j。
2)让我们参加控制系统的传递函数的另一个例子![]()
解决方案
在上面的传递函数中,如果分子的值为零,则![]()
这些是功能的零的位置。
类似地,在上述传递函数中,如果分母的值为零,则![]()
这些是该功能的极点的位置。
随着零的数量应该等于极数,剩余的三个零位位于S→∞处。网络的传递函数示例
解决方案
在上面的网络中,很明显![]()
让我们假设,![]()
考虑到初始条件为零,获取上述方程的拉普拉斯变换,我们得到,![]()
脉冲信号的影响
![]()
单位脉冲函数的拉普拉斯变换为1。![]()
现在,如果输入信号是单位脉冲信号,那么![]()
输出函数与其传输函数相同。传递函数示例
![]()
系统的转移功能是什么?
解决方案
对于脉冲响应,系统的输出C(S)等于系统的传输功能。![]()
![]()
2)找到函数的极点和零![]()
解决方案![]()
![]()
![]()
找到传递函数。
解决方案
这里,极点是S = - 3, - 1,0。
因此,该功能的分母是,![]()
零是-4, - 2。![]()
因此,转移功能是,![]()
其中,k是增益因子控制系统。
4)找到在S = 2处的值为2的传递函数的增益因子k,传递函数给出![]()
解决方案
现在,根据问题的条件,![]()
![]()
解决方案
从我们得到的电路,![]()
现在申请拉普拉斯变换在双方我们得到,![]()
作为所应用的电压是原因和相应的充电当前的是效果,可以认为施加的电压可以被认为是输入,充电电流可以被认为是输出。![]()
6)找到下面给出的网络的传递函数,![]()
解决方案
在上图中,施加电压V(t),输出被测量,因为电压出现在横跨电压电容器c是vC(t)。![]()
拉普拉斯变换传递函数是![]()
7)由于施加扭矩T抵抗轴承摩擦F,旋转内轴J的轴旋转成角θ。找到系统的传递函数。
解决方案
上述声明的微分方程形式是![]()
参加系统两侧的拉普拉斯变换,![]()
由于输入施加的扭矩并且输出系统的输出角位移。
8)系统的脉冲响应由c(t)= 1 - te给出-2t.+ sin3t。找到系统的传输功能
解决方案![]()
9)找到由提供系统的脉冲响应的传递函数![]()
解决方案![]()



")
