
什么是第一阶控制系统?
一个一阶控制系统被定义为一种类型控制系统谁的输入输出关系(也称为a传递函数)为一阶微分方程。一阶微分方程包含一阶导数,但没有高于一阶的导数。微分方程的阶是方程中最高阶导数的阶。
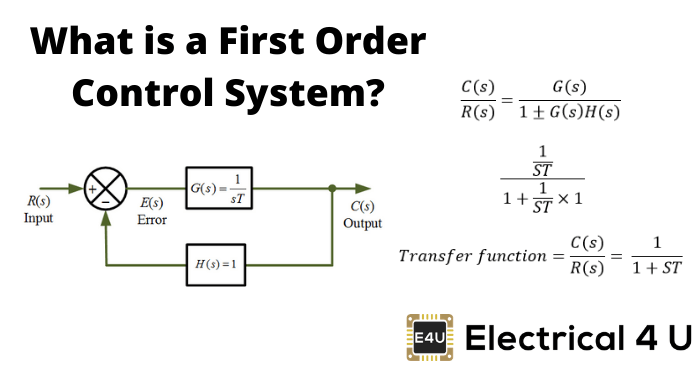
例如,让我们查看下面所示的控制系统的框图。
该控制系统的传递函数(输入输出关系)被定义为:

地点:
- K是直流增益(输入信号与输出稳态值之间的系统比率的DC增益)
- T是时间常数(时间常数是一阶系统对单位阶跃输入的响应速度的度量)
请记住,微分方程的顺序是等式中存在的最高阶数的顺序。我们评估了这一点 。
。
因为在这里
是第一个权力( ),上面的传递函数是一阶微分方程。因此,上面的框图表示一阶控制系统。
),上面的传递函数是一阶微分方程。因此,上面的框图表示一阶控制系统。
在一个理论的替代例子中,让我们说传递函数等于:

在这个例子中
是第二个电力( )时,传递函数为二阶微分方程。因此,具有上述传递函数的控制系统将是二阶控制系统。
)时,传递函数为二阶微分方程。因此,具有上述传递函数的控制系统将是二阶控制系统。
大多数实际模型是一流的系统。如果具有更高级的系统具有主导的一阶模式,则可以被视为一阶系统。
工程师试图找出系统的技术变得更加高效可靠。有两种控制系统的方法。一个是一个开环控制系统,另一种是闭环反馈控制系统。
在开环系统中,输入进入给定的过程并产生输出。没有反馈回到系统中的系统,因为系统“知道”如何关闭实际输出到所需的输出。
在闭环控制系统中,系统具有检查实际输出偏离所需输出的距离(随着时间接近无穷大的情况,这种差异是已知的稳态错误)。它将这个差异作为反馈传递给控制器谁控制着这个系统。控制器将根据这个反馈调整其对系统的控制。
如果输入是单位步骤,则输出是步进响应。阶跃响应产生了对系统的瞬态响应的清晰视觉。我们有两种类型的系统,一阶系统和二阶系统,其代表许多物理系统。
系统的一阶被定义为对时间的一阶导数系统的二阶是对时间的二阶导数。
一阶系统是只有一个积分器的系统。随着订单数量的增加,系统中集成商的数量也在增加。数学上,它是给定函数对时间的一阶导数。
我们有不同的技术来解决使用微分方程或使用差分方程的系统方程拉普拉斯变换但工程师已经找到了方法来最小化求解突变输出和工作效率的方程的技术。系统的总响应是强制响应和自然反应的总和。
强制响应也称为稳态响应或特定方程。自然反应也称为均匀的方程。
在继续进行本主题之前,您应该了解控制工程极点、零和的概念传递函数以及反馈控制系统的基本概念。在这里,提醒您的记忆与反馈控制系统的基本概念。
一阶控制系统传递函数
一个传递函数表示控制系统的输出信号和输入信号之间的关系,对于所有可能的输入值。
转移函数的极点
传递函数的极点是拉普拉斯变换值变量(s),使传递函数变为无穷大。
传递函数的分母实际上是功能的极点。
传递函数的零
传递函数的零是拉普拉斯变换变量(s)的值,这导致传递函数变成零。
传递函数的提名者实际上是函数的零
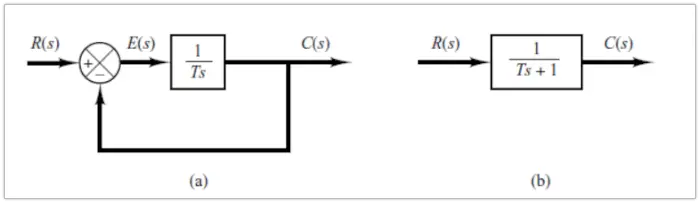
一阶控制系统
本文讨论了无零的一阶控制系统。一阶控制系统告诉我们响应的速度,它达到稳态的持续时间。
如果输入是单位阶跃响应,R(s) = 1/s,那么输出是阶跃响应C(s)。一阶控制系统的一般方程为 ,即
,即 是传递函数。
是传递函数。
有两个极点,一个是输入极点在原点s = 0,另一个是系统极点在s = -a,这个极点在极点图的负轴上。我们可以在MATLAB软件中使用命令pzmap(这代表零极点地图)找到极点和零。
我们现在采取逆变换,因此总回应成为 这是强制响应和自然反应的总和。
这是强制响应和自然反应的总和。
由于原点处的输入杆,产生强制响应,因为它本身描述的名称被强制向系统施加,所以它产生了一些强制响应的响应,并且系统杆在-A处产生自然反应,这是由于瞬态导致的自然反应系统的响应。
经过一些计算,这里的一般形式一阶系统C(s) = 1-e吗-在这等于强制响应,即“1”和自然反应,其等于“e-在”。我们只需要找到参数“a”。
很多技巧,比如微分方程或逆拉普拉斯变换,这些都解决了总响应,但这些都是费时费力的。
使用杆子,零和有一些基本的概念为我们提供了解决问题的定性信息,并且由于这些概念,我们可以轻松地讲述响应的速度和系统的时间来达到稳态点。
让我们描述一阶控制系统的三个瞬态响应性能规范,时间常数,上升时间和建立时间。
一阶控制系统的时间常数
的时间常数可以定义为阶跃响应上升到其最终值的63%或0.63所花费的时间。我们称之为t = 1/a。如果取时间常数的倒数,它的单位是1/秒或频率。
我们称参数a为指数频率。因为e-at在t = 0时的导数是-a。因此,时间常数被认为是a的暂态响应规范一阶控制系统。
我们可以通过设置电杆来控制反应速度。因为极点离虚轴越远,瞬态响应越快。因此,我们可以在远离虚轴的地方设置极点来加速整个过程。
一阶控制系统的上升时间
上升时间被定义为波形到最终值的0.1至0.9或10%至90%的时间。对于上升时间的等式,我们分别在一般一阶系统方程中放置0.1和0.9。
对于t = 0.1
对于t = 0.9
取得0.9和0.1之间的差异
这是上升时间的方程。如果我们知道a的参数,把a代入方程就可以很容易地求出任意给定系统的上升时间。
第一个阶控制系统的安置时间
稳定时间被定义为响应达到的时间,并保持在最终价值的2%内。我们可以将百分比限制为最终价值的5%。两个百分比都是考虑因素。
稳定时间的等式由t给出年代= 4 / a。
通过使用这三种瞬态响应规范,我们可以很容易地计算一个给定系统的阶跃响应,这就是为什么这个定性技术对阶跃系统方程是有用的。
第一阶控制系统的结论
在学习与之相关的所有事物之后1订单控制系统,我们得出以下结论:
- 输入功能的极点会产生强制响应的形式。它是因为在原点处的极点,它在输出处产生阶跃函数。
- 传递函数的极点产生自然反应。它是系统的极点。
- 实轴上的极点产生e-at形式的指数频率。因此,极点离原点越远,指数瞬态响应衰减到零的速度就越快。
- 利用极点和零点,可以提高系统的性能,得到理想的输出。




