
在此之前我向大家介绍一下各种控制系统补偿具体来说,了解补偿网络在电网中的应用是非常必要的控制系统.补偿网络的重要用途写在下面。
必要的补偿
- 为了获得理想的系统性能,我们采用了补偿网络。补偿网络以前馈路径增益调整的形式应用于系统。
- 对不稳定系统进行补偿,使其稳定。
- 补偿网络用于最小化超调。
- 这些补偿网络增加了系统的稳态精度。这里要注意的一个重要点是稳态精度的增加带来了对系统的不稳定性。
- 补偿网络还在系统中引入极点和零点,从而引起系统传递函数的变化。因此,系统的性能规格发生了变化。
赔偿方法
-
- 连接补偿电路误差检测器植物被称为串联补偿.
串联补偿器
-
- 当用反馈方式调用补偿器时反馈补偿.
反馈补偿器
-
- 调用系列和反馈补偿器的组合负载补偿.
什么是补偿网络?补偿网络是指对系统进行一定的调整以弥补系统的不足。补偿装置的形式有电气、机械、液压等。大多数电补偿器是RC滤波器。用于补偿器的最简单的网络称为超前滞后网络。
相位超前补偿
一个系统有一个极点和一个主零(比所有的零更接近原点的零被称为主零)被称为先导网络。如果我们想加一个主零控制系统补偿那我们就得做出选择超前补偿网络。
相位超前网络的基本要求是网络传递函数的所有极点和零点必须位于(-)实轴上,并相互交错,零点位于最近原点的原点上。
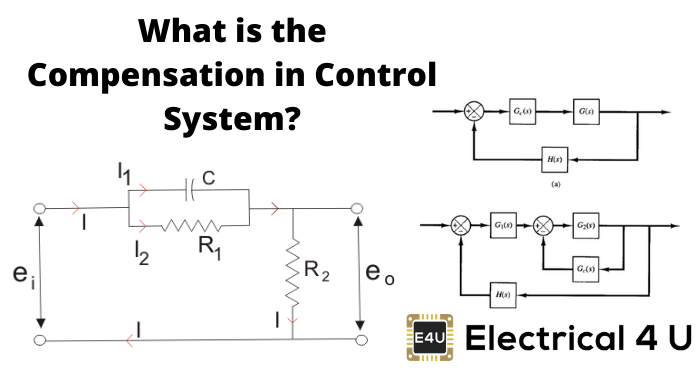
下面是相的电路图超前补偿网络。
阶段铅补偿网络
从上面的电路,
等于上面的I的表达式,
现在我们来确定给定网络的传递函数,而传递函数可以通过找到输出的比值来确定电压到输入电压。
所以采取拉普拉斯变换上面方程的两边,

代入α = (R1+ R2) / R2T = {(R1R2) / (R1+ R2)}。
其中,T和α分别为时间常数和衰减常数,有
上述网络可以看作增益为1/α的放大器。让我们为上面的传递函数画出极点零图。
铅补偿网络零点极值图
显然,我们有-1/T(传递函数的零点)比-1/(αT)(传递函数的极点)更接近原点。因此,我们可以说lead compensator zero is more dominating than the pole and because of this lead network introduces positive phase angle to the system when connected in series.
让我们在上面的传递函数中代入s = jω,我们也得到α < 1。求传递函数的相位角函数
现在为了找出在某个频率下的最大相位超前让我们微分这个相位函数并使它等于零。解上述方程,我们得到
在那里,θ米为最大相位超前角。以及最大θ的传递函数的相应幅度米是1 /。
相位超前补偿的影响
- 速度常数Kv增加。
- 幅度图的斜率在增益交叉频率处降低,因此相对稳定性提高,由于误差而减少的误差与斜率成正比。
- 阶段利润增加。
- 反应会变得更快。
相位超前补偿的优点
让我们讨论一下相位超前补偿的一些优点-
- 由于相位超前网络的存在,使系统的增益分频移到一个更高的值,从而提高了系统的速度。
- 由于相位超前补偿的存在,系统的最大超调量减小。
相位超前补偿的缺点
介绍了相位超前补偿的一些缺点
- 稳态误差没有改善。
相位滞后补偿
一个系统有一个0和一个主极(更接近原点的极,所有其他的极被称为主极)被称为滞后网络。如果我们想增加一个主导杆控制系统补偿然后,我们要选择a滞后补偿网络。
阶段滞后网络的基本要求是网络的传递函数的所有极点和零必须位于( - )ve实轴上彼此相互界限,杆位于或最接近原点。
下面是相的电路图滞后补偿网络。
相位滞后补偿网络
我们会得到这个级数组合的输出电阻器R2和电容器C。
从上面的电路图,我们得到
现在我们来确定给定网络的传递函数,而传递函数可以通过找到输出的比值来确定电压到输入电压。
采取拉普拉斯变换我们得到,
在替换 式中(T为时间常数,β为直流增益),有
式中(T为时间常数,β为直流增益),有
上述网络提供了1 / β的高频增益。让我们为上面的传递函数画出极点零图。
滞后网络的极点零图
显然,我们有-1/T(传递函数的一个零)远比-1/ (βT)(传递函数的极点)远。因此,我们可以说在滞后补偿器极点是更支配比零,因为滞后网络引入负相位角时,系统串联。
让我们在上面的传递函数中代入s = jω同样我们有一个< 1。求传递函数的相位角函数
现在为了找出在一个频率上最大的相位滞后让我们微分这个相位函数并使它等于零。解上述方程,我们得到
在那里,θ米为最大相位超前角。记住β通常是大于10的。
阶段滞后补偿的影响
- 增益交叉频率增加。
- 带宽降低。
- Phase margin将会增加。
- 由于带宽的减少,响应速度变慢,上升时间和沉降时间变长。
相位滞后补偿的优点
让我们讨论一下相位滞后补偿的一些优点-
- 相位滞后网络允许低频和高频被衰减。
- 由于相位滞后补偿的存在,提高了稳态精度。
阶段滞后补偿的缺点
阶段滞后补偿的一些缺点 -
- 由于相位滞后补偿的存在,系统的速度下降。
相位滞后超前补偿
单滞后或超前补偿可能不满足设计要求。对于不稳定的无补偿系统,超前补偿提供了快速响应但不能提供足够的相位裕度,而滞后补偿稳定了系统但不能提供足够的带宽。所以我们需要级联多个补偿器。
下面是相的电路图滞后-超前补偿网络。
滞后超前补偿网络
现在我们来确定给定网络的传递函数,传递函数可以通过求输出的比值来确定电压到输入电压。
代入αT1= R1C1, R2C2=βT2, R1R2C1C2T =αβ1T2和T1T2= R1R2C1C2式中(其中T1T2α、β分别为时间常数和衰减常数)。我们有
让我们为上面的传递函数画出极点零图。
杆零块滞后网
显然,我们有-1/T(传递函数的一个零)比-1/(βT)(传递函数的极点)离原点远。因此,我们可以说lag-lead补偿极点比零更占优势,由于这种滞后引线网络可以引入正相位角系统时,串联。
相位滞后超前补偿的优点
让我们讨论阶段滞后补偿的一些优点 -
- 由于相位滞后超前网络的存在,使系统的增益分频移到一个更高的值,从而提高了系统的速度。
- 由于相位滞后的存在,提高了网络的精度。




