
内容
什么是奈奎斯特标准
奈奎斯特稳定标准(或者奈奎斯特标准)是一种使用的图形技术控制工程用于确定动力系统的稳定性。随着奈奎斯特稳定标准仅考虑奈奎斯特图的开环控制系统,可以应用,而无需明确计算闭环或开环系统的极点和零。
结果,奈奎斯特标准可以应用于由非Rational函数(例如具有延迟的系统)定义的系统。不像BODE PLOTS.,它可以处理带有右半平面的奇点的传递函数。
奈奎斯特稳定标准可以表示为:
z = n + p
在哪里:
- Z = S平面右侧(RHS)中的1 + G(S)的根数(其也称为特性方程的零)
- n =临时方向临界点1 + J0的环绕数
- p =开环传输功能的极数(OLTF)[即在S平面的R铑中g(s)]。
上述条件(即Z = N + P)对于所有系统有效,无论是稳定还是不稳定。
现在我们将用奈奎斯特稳定标准的例子解释这一标准。
奈奎斯特稳定标准例子
奈奎斯特标准例1
考虑一个开环传送功能(OLTF),如 它是一个稳定的系统还是不稳定的。也许大多数人都会说它是一个不稳定的系统,因为一个杆是+2。但请注意,稳定性取决于闭环传输功能的分母。
它是一个稳定的系统还是不稳定的。也许大多数人都会说它是一个不稳定的系统,因为一个杆是+2。但请注意,稳定性取决于闭环传输功能的分母。
如果闭环传递函数(也称为特性方程也称为)的任何根的根部是S平面的RH,则系统不稳定。因此,在上面的情况下,+2的杆将尝试将系统带到不稳定,但系统可能是稳定的。这里奈奎斯特图是有用的,无法找到稳定性。
根据奈奎斯特理论z = n + p(对于任何系统,无论是稳定还是不稳定)。
对于稳定的系统,Z = 0,即无特征方程的根部应该是RHS。
所以对于稳定的系统n =-P.
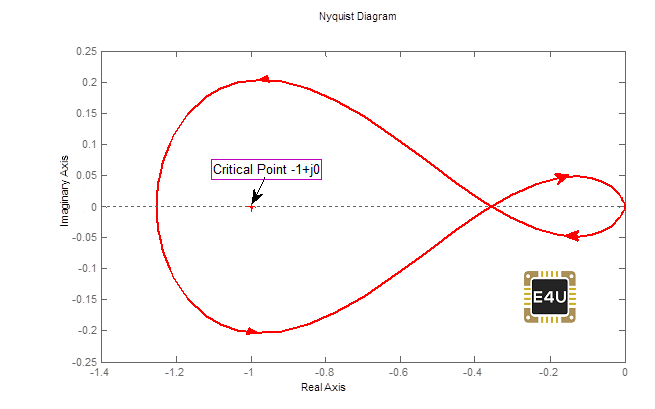
上述系统的奈奎斯特图如下所示
Nyquist Plot Matlab代码
s = tf('s')g1 = 120 /((s-2)*(s + 6)*(s + 8))nyquist(g1,'红色')根据该图,奈奎斯特曲线围绕重点-1 + J0(也称为关键点)一次以计数器时钟明智的方向。因此n =-1,在OLTF中,一个杆(AT +2)位于RHS,因此p = 1。你可以看到n =-P,因此系统是稳定的。
如果您发现特征方程的根,那将是-10.3,-0.86±J1.24。(即系统是稳定的),z = 0。如果可以找到特征方程的根源,因此可以提出一个问题,因此我们可以在此基础上对稳定性发表评论,那么奈奎斯特情节的需要。答案是,当软件无法使用时,在那些日子中,奈奎斯特情节非常有用。
奈奎斯特标准例2
现在拿另一个例子:
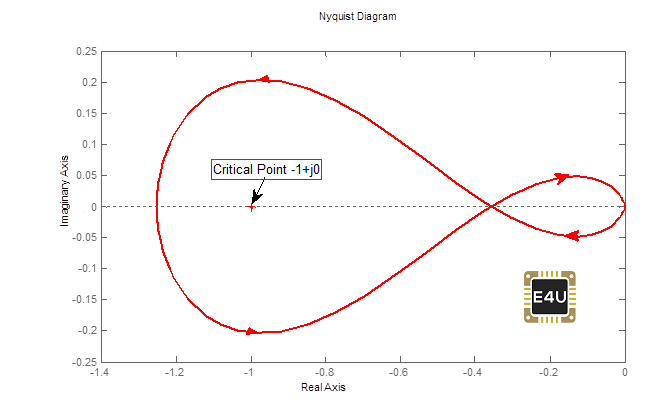
奈奎斯特情节如下:
Nyquist Plot Matlab代码
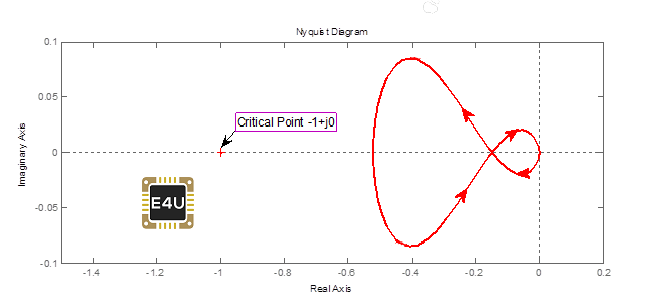
s = tf('s')g2 = 100 /((s-2)*(s + 6)*(s + 8))nyquist(g2,'红色')从图中,可以发现n =-1.(临界点的奈奎斯特情节的环节是一个计数器时钟方向的一个)
在该示例中,也p = 1。(RHS的OLTF的一极)
所以,n =-P.因此系统是稳定的。
(特征方程的根源是-10.04,-1.72,-0.23)
奈奎斯特标准例3
现在拿另一个例子:
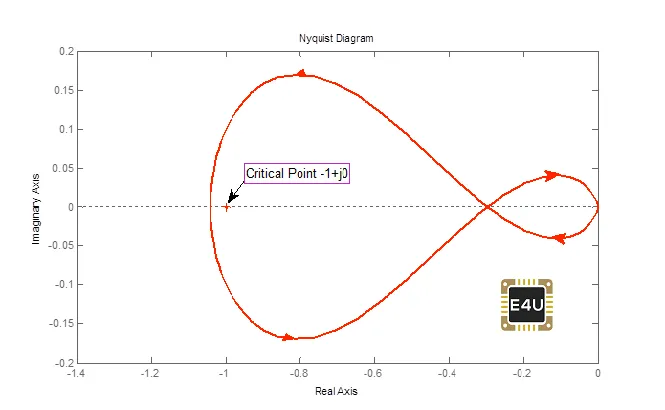
这里再次p = 1。
奈奎斯特情节如下:
Nyquist Plot Matlab代码
S = TF('s')G3 = 50 /((S-2)*(S + 6)*(S + 8))奈奎斯特(G3,'RED')你可以看到n = 0。(没有关键点的环节)。由于n不等于-p,因此系统不稳定。(特征方程的根源是-9.32,-3.92,1.255)即Z = 1(rHS上的1.255杆)。
因此,您可以理解,条件z = n + p对所有系统有效。
奈奎斯特标准例4
现在考虑
如果您将绘制其奈奎斯特图,则会通过关键点(-1 + j0)。在这种情况下,系统略微稳定。
在这种情况下,您可以理解'n'(在本例中,在当前情况下,特性方程的两个根部将处于S平面左侧的原点和一个根。因此,系统将略微稳定)。
在上面的所有示例中,您可以看到分母是相同的,但分子是不同的,或者说明分子是可变的。所以,让我们考虑以下开环传输功能:
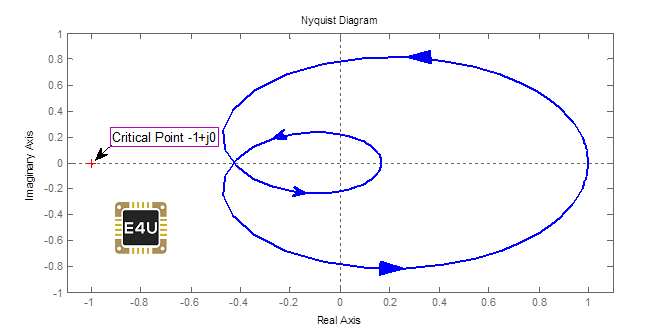
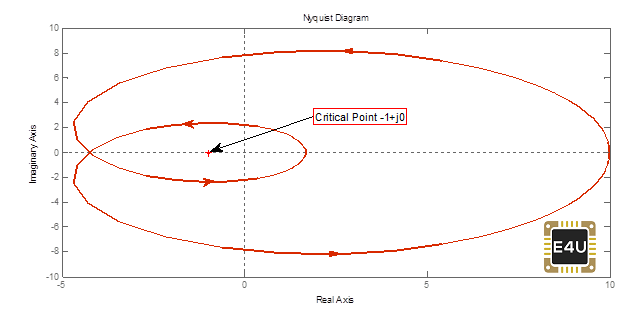
如果您将把Routh Hurwitz标准应用于特征方程1 + G(s),那么您将发现'k'为96 所以,现在您可以理解为什么系统中的系统1-4是稳定的,不稳定或略微稳定的。 您可以绘制上述传输功能的根轨迹,它将是: 根基因座的分支从2,-6,-8开始,其中k = 0。因此,您可以看到k <96,闭环传递函数的一极位于S平面的RHS,因此对于K <96系统是不稳定的。系统稳定为96 如果您将决定k = 337,则闭环传输功能的两个极是复杂的,一个杆是真实的;但系统将不稳定。为了进一步理解,您可以参考文章根基因座。 请注意以下声明: 增益率(GM)和相位保证金(PM)是阳性的,如果系统稳定,如果系统不稳定,如果系统略有稳定,则均为零。GM&PM更高,系统稳定更多(这是GM&PM的测量称为相对稳定性)。 但如果没有oltf的杆位于S平面的磁线中,则上述陈述是正确的。在上述所有实施例中,OLTF的一极是+2;在这种类型的系统中,奈奎斯特稳定标准是有帮助的。 现在我们将占用更多例子: 考虑 它的奈奎斯特情节如下: 根据传递函数p = 2(RHS上的两极的OLTF) 根据Nyquist Plot n = 0 因此z = n + p = 2;意味着在S面的RHS中闭环传递函数的两个极点,因此系统不稳定。 考虑 它的奈奎斯特情节如下: 根据传递函数p = 2(RHS上的两极的OLTF) 根据Nyquist Plot n =-2 因此z = n + p = 0;意味着在S面的RHS中没有闭环传递函数的磁极,因此系统是稳定的。 请注意,我们使用了公式z = n + p,其中n =临时方向临界点1 + j0的环绕数。在几本书中,您可以找到公式z = n + p,其中n =临界点1 + J0的环绕数在逆时针方向上。两者都是正确的。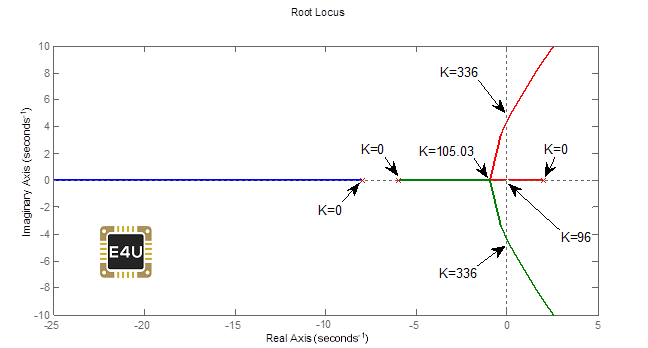
Nyquist Plot Matlab代码
S = TF('s')G4 = 1 /((S-2)*(S + 6)*(S + 8))RLOCUS(G4)奈奎斯特标准例5

Nyquist Plot Matlab代码
s = tf('s')g5 =((s + 1)*(s + 2))/((s-3)*(s-4))奈奎斯特(g5,'红色')奈奎斯特标准例6

Nyquist Plot Matlab代码
s = tf('s')g6 =(10 *(s + 1)*(s + 2))/((s-3)*(s-4))nyquist(g6,'红色')
")
")
")

