
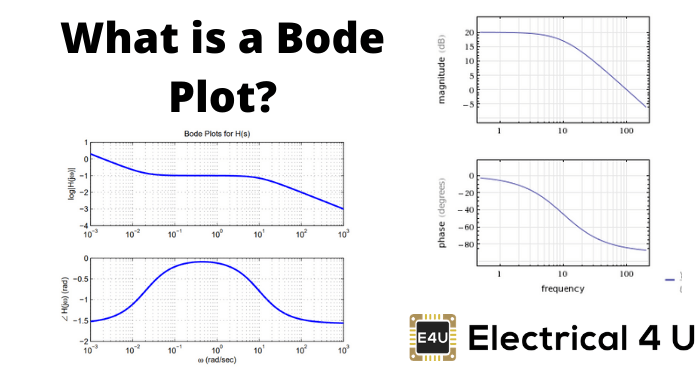
什么是预兆情节
一个波德图图表是常用的吗控制系统工程来确定a的稳定性控制系统。波德图通过两个图来表示系统的频率响应波德级情节(以分贝表示大小)和波德相图(以度表示相移)。
博德图最早是在20世纪30年代由亨德里克·韦德·博德(Hendrik Wade Bode)提出的,当时他在美国贝尔实验室工作。尽管波德图提供了一种计算系统稳定性的相对简单的方法,但它不能处理具有右半平面奇点的传递函数奈奎斯特稳定性判据)。
理解获得的利润和阶段的利润是理解波德情节的关键。这些术语的定义如下。
增益裕度
越大增益裕度(GM),系统的稳定性越大。增益裕度是指增益的数量,它可以增加或减少,而不会使系统不稳定。它通常用分贝来表示。
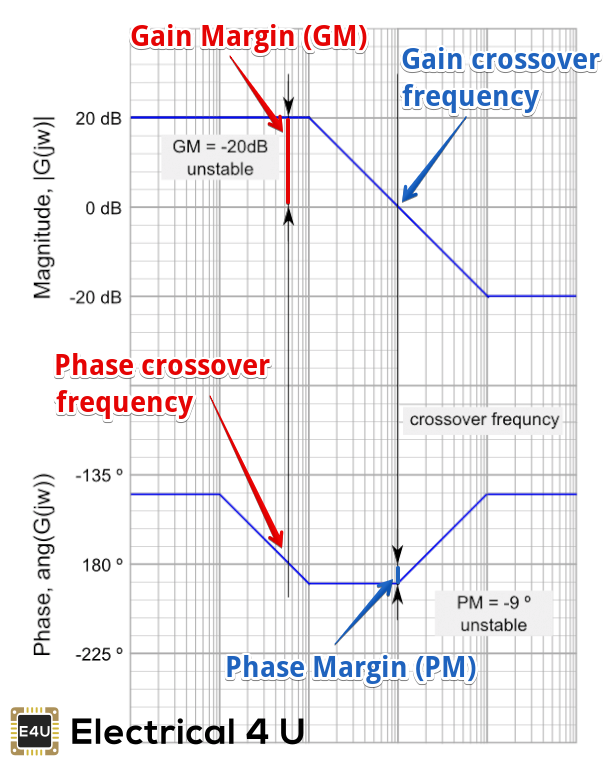
我们通常可以直接从伯德图(如上图所示)中读出增益裕度。这是通过计算幅度曲线(在波德幅度图上)与波德相位图= 180°频率处的x轴之间的垂直距离来实现的。这个点被称为阶段交叉频率。
认识到这一点很重要收益和收益幅度不是一回事。事实上,增益裕度是增益的负值(单位是分贝,dB)。当我们看增益裕度公式时,这将是有意义的。
增益裕度公式
的增益裕度公式(GM)表示为:

在哪里G是利益。这是在相位交叉频率上从幅度图的垂直轴读取的幅度(以dB为单位)。
在上图的例子中,增益(G)是20。因此,使用我们的增益裕度公式,增益裕度等于0 -20 dB = -20 dB(不稳定)。
阶段保证金
越大阶段保证金(PM),系统的稳定性就越大。相位裕度是指在不使系统不稳定的情况下,可以增加或减少的相位量。它通常表示为以度表示的相位。
我们通常可以直接从伯德图(如上图所示)中读取相位裕度。这是通过计算相位曲线(在波德相位图上)和波德幅度图= 0 dB频率处的x轴之间的垂直距离来完成的。这个点被称为获得交叉频率。
认识到这一点很重要相位滞后和相位裕度不是一回事。当我们看相位裕度公式时,这就说得通了。
阶段保证金公式
的相位裕度公式(PM)表示为:

在哪里 为相位滞后(小于0的数字)。这是在增益交叉频率处从相位图的垂直轴读取的相位。
为相位滞后(小于0的数字)。这是在增益交叉频率处从相位图的垂直轴读取的相位。
在上图的例子中,相位滞后为-189°。因此,使用我们的相位裕度公式,相位裕度等于-189°-(-180°)= -9°(不稳定)。
另一个例子是,如果放大器的开环增益在相位滞后为-120°的频率上超过0 dB,那么相位滞后为-120°。因此,该反馈系统的相位裕度为-120°-(-180°)= 60°(稳定)。
波德图的稳定性
以下是与绘制波德图(并计算其稳定性)有关的标准汇总列表:
- 增益裕度:更大的增益裕度系统的稳定性将会提高。它是指增益量,增益量可以增加或减少,而不会使系统不稳定。它通常用dB表示。
- 阶段保证金:更大的阶段保证金系统的稳定性将会提高。它是指可以增加或减少而不使系统不稳定的相位。它通常以相表示。
- 获得交叉频率:它是指波德图中星等曲线与零点dB轴相交的频率。
- 相位交叉频率:图中相位曲线与负的180o轴相交的频率。
- 角频:两条渐近线相交或相遇的频率称为断频或角频。
- 谐振频率:G (jω)的模量峰值的频率值称为谐振频率。
- 因子:每个循环传递函数{即G(s)×H(s)}各种因子的乘积,如常数项K,积分因子(jω),一阶因子(1 + jωT)(±n),其中n是整数,二阶或二次因子。
- 坡:每个因素都有相应的斜率,每个因素的斜率以每十年的dB表示。
- 角度:每个因子对应一个角,每个因子对应的角用度数表示。
为了画出波德曲线,我们需要记住一些结果。这些结果如下:
- 常数项凯西:这个因子的斜率为0分贝每十年。没有角频率对应于这个常数项。相角与这个常数项相关也是零。
- 积分因子1 /(ω)n:这个因子的斜率是-20×n(其中n是整数)dB每十年。没有角频率对应于这个积分因子。相角与这个积分因子相关是-90×n,这里n也是一个整数。
- 1/ (1+jωT):这个系数的斜率是-20分贝每十年。角的频率对应于这个因子是1/T弧度/秒。与第一个因子相关的相角是-tan- 1(ωT)。
- 一阶因子(1+jωT)这个系数的斜率是每十年20分贝。角的频率对应于这个因子是1/T弧度/秒。与第一个因子相关的相角是tan- 1(ωT)。
- 二阶或二阶因素:[{1 /(1 +(2ζ/ω)}×(ω)+{(1 /ω2)}×(ω)2):这个系数的斜率是-40分贝每十年。这个系数对应的转角频率是ωn弧度每秒。与第一个因子相关的相角是

如何绘制预兆图
牢记以上所有要点,我们能够为任何一种控制系统绘制波德图。现在我们来讨论绘制预兆图的程序:
- 将s = jω代入开环传递函数G(s)×H(s)中。
- 找出相应的角落频率并将它们制成表格。
- 现在我们要求一个半对数图选择一个频率范围,这样绘图应该从低于最低角频率的频率开始。在x轴上标出角频率,在y轴的左边标出斜率,中间标出斜率为零,在右边标出相位角,取-180o在中间。
- 计算增益系数和系统的阶数类型。
- 现在计算每个因子对应的斜率。
画的波德级情节:
- 在半对数坐标纸上标出转角频率。
- 按照给定的顺序将这些从上到下的因素列成表。
- 常数项K。
- 积分因子
- 一阶因子
- 一阶因子(1+jωT)。
- 二阶或二次因子:
- 现在借助给定因子对应的斜率画出这条线。通过添加下一个因子的斜率来改变每个转角频率处的斜率。你会得到大小图。
- 计算增益裕度。



画的波德相图:
- 将所有相位因子相加,计算相位函数。
- 对上述函数代入不同的值,可求出不同点的相位,并绘制出曲线。你会得到相曲线。
- 计算相位裕度。
波德稳定性判据
稳定性条件如下:
- 对于稳定的系统:两者的裕度都应该是正的或者相位裕度应该大于增益裕度。
- 对于边际稳定系统:两者的裕度都应该是零或相位裕度应该等于增益裕度。
- 对于不稳定的系统:如果它们中有一个是负的或者阶段保证金应该小于增益范围。
波德阴谋的优点
- 它基于渐近近似,为绘制对数幅度曲线提供了一种简单的方法。
- 传递函数中出现的各种大小的乘法可以看作是加法,而除法可以看作是减法,因为我们使用的是对数尺度。
- 在此图的帮助下,我们只能直接评论系统的稳定性,而不需要做任何计算。
- 波德图提供相对的稳定性增益裕度和阶段保证金。
- 它也涵盖了从低频到高频的范围。
")



