
在1891年的法兰克福展览会上,尼古拉·特斯拉展示了一种粗糙的多相感应电动机。感应电动机被广泛使用。世界上近80%的交流电机是多相感应电机。因此,电机的速度控制是一个重要的课题。的多相感应电机的速度控制可以通过不同的方法来完成。本文将讨论利用变转子控制绕线式转子感应电动机的速度电阻。
传统的改变转子电阻的方法是在电动机的三相绕组上插入可变变阻器串联。这种速度控制方法面临着一些问题,而且在经济上不可行。转子电阻的变化可以用电力电子设备这是一个更有效的方法。这里我们将展示如何实现这一点。
基本概念
的转矩方程对于多相感应电动机为:
在正常工作条件下2r / s≫1, x1因此方程变成了,
这个方程表明,当转矩不变时,转差率与转子电阻成正比。如果转子电路中的电阻增加,则转差率增加,转子转速降低。此方法仅适用于绕线转子感应电动机。
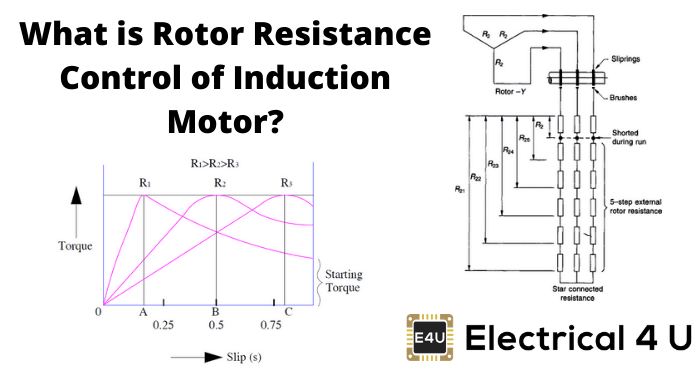
从图1可以清楚地看出,转速是如何随转子电阻的变化而变化的。
在正常工作条件下,转差率随转矩的增加而增加,因此它们服从线性特性。对于一个固定的负载曲线,速度从n向下1到n4。从这个图中我们也可以得到在阻力r开始处的最大扭矩2”。因此,这种方法的优点是在起动阶段获得最大扭矩。
特征
而最大转矩与转子阻力无关,由式可知,
当需要间歇速度控制时使用这种类型的速度控制。
它有一些缺点
- 的变阻器用来改变每一相位的电阻,从而引起转子不平衡。
- 阻力产生巨大的损失,并在系统中产生热量。
- 在大型机器的情况下,变阻器的尺寸会很大,在这种情况下,它不容易携带。
- 它需要更多的维护,因此与它相关的成本也更高。
- 这种方法不能用于工业自动化目的:因为我们必须手动改变电阻的值。
上述问题可以很容易地通过使用脉宽调制(PWM)或脉宽调制(PDM)来消除桥式整流器和一个开关晶体管。
转子电阻也可以使用图(a)所示的电路无级地改变。转子的交流输出电压被整流二极管桥式整流并馈给并联固定组合电阻器R和一个半导体开关晶体管Tr。A、B端电阻有效值,即RAB是由不同的占空比晶体管Tr,从而改变转子电路的电阻。电感添加到电路,以减少纹波和不连续在直流链路电流Id。忽略纹波时,转子电流波形如图(b)所示。因此,均方根值的水流将是
当晶体管开启时,A和B端之间的电阻为零,当晶体管关闭时,A和B端之间的电阻为R。因此,两个端之间的电阻平均值为
式中,δ为晶体管的占空比。
电力被R消耗AB每相电阻为
从这个方程可以看出,每相转子电路电阻增加了0.5(1-δ)R。因此,总电路电阻可以评估。
因此,转子总电阻的变化范围为Rr(1-δ)R随δ值的变化范围为1 ~ 0。
采用静态装置控制感应电机速度的优点

结论
虽然这个方法感应电机的速度控制使用这种技术是高效的,但是由于我们在这里用电阻来控制电机的速度,也会产生电阻损耗,对电机造成不必要的加热效果,也在一定程度上降低了效率。这就是为什么它不能连续运行,它被用于间歇应用,如架空起重机,负载波动等。




